Descrição do Servomecanismo de Posicionamento Linear
Professor: José Paulo V. S. da Cunha
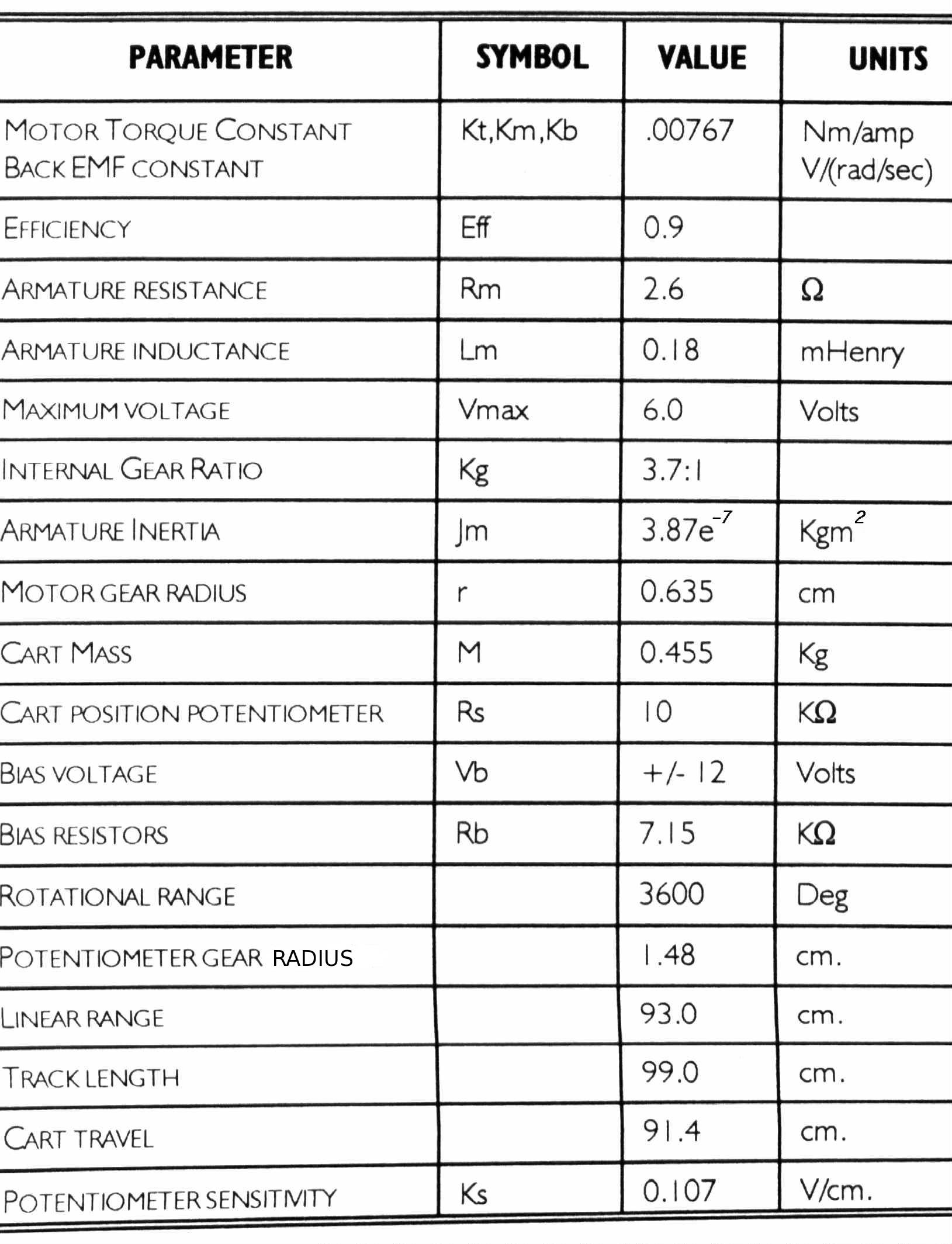
O sistema eletromecânico Linear Position Servo, a ser utilizado nos experimentos, é descrito nas Seções 3.1 e 5.2.1 do manual (Apkarian, 1995). A Figura 1 apresenta o diagrama mecânico do carrinho destacando-se as engrenagens do motor e a engrenagem do potenciômetro. A Figura 2 apresenta o diagrama elétrico da conexão do motor com o amplificador operacional de potência e a conexão do potenciômetro de medição de posição com o sistema de aquisição de dados. A Tabela 1 relaciona os valores nominais dos parâmetros a serem usados na modelagem da dinâmica do sistema.
A modelagem deste servomecanismo pode ser auxiliada pelo estudo de um exemplo na Seção 4.3 do livro (Ogata, 1998), do Exemplo A.3.23 do livro (Ogata, 2003) ou Exemplo A.3.9 do livro (Ogata, 2010).
Referências
Apkarian, J. (1995), A Comprehensive and Modular Laboratory for Control Systems Design and Implementation, Quanser Consulting.
Ogata, K. (1998), Engenharia de Controle Moderno, 3ª Edição, Livros Técnicos e Científicos S.A..
Ogata, K. (2003), Engenharia de Controle Moderno, 4ª Edição, Pearson Education do Brasil.
Ogata, K. (2010), Engenharia de Controle Moderno, 5ª Edição, Pearson Education do Brasil.
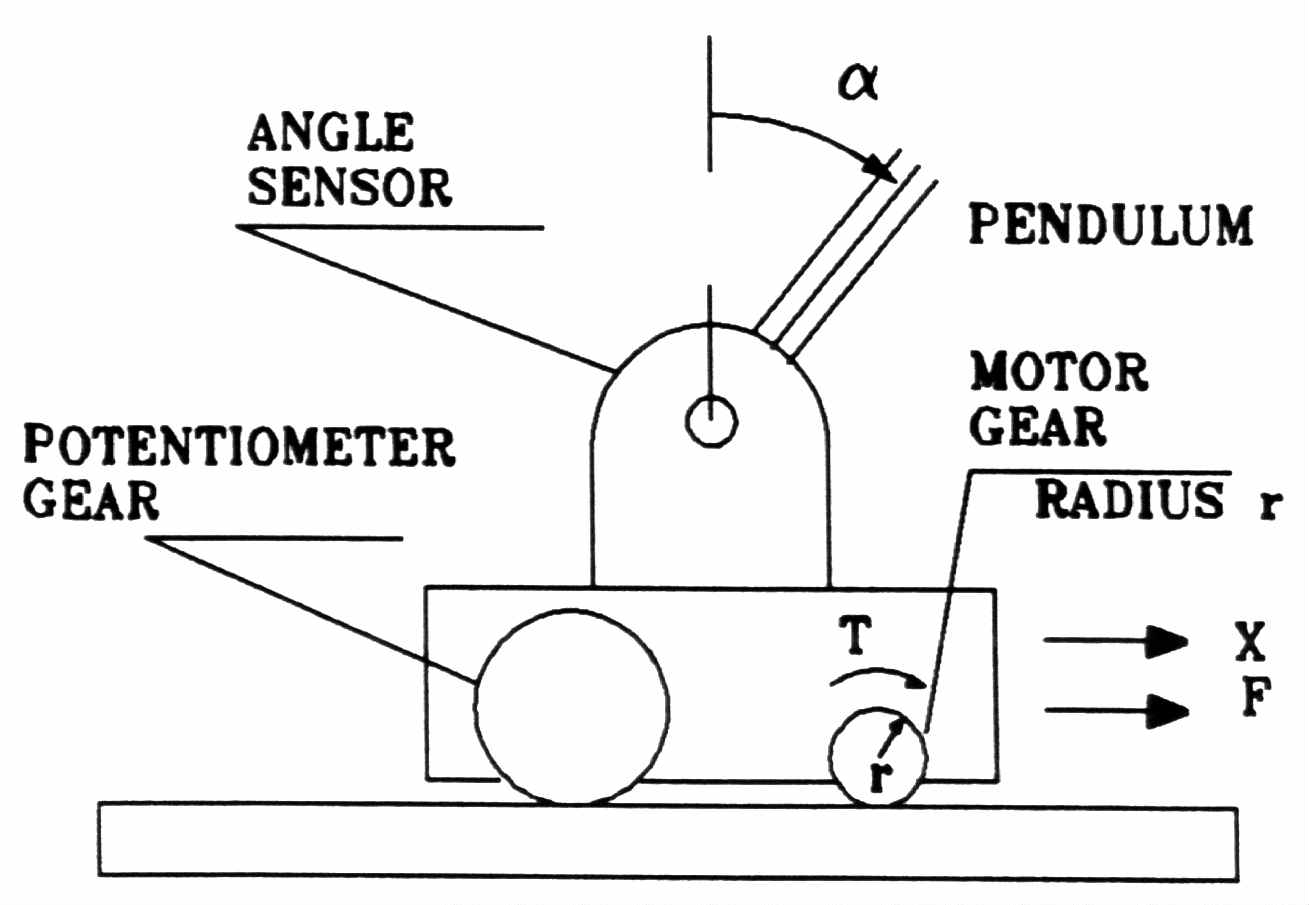
Figura 1:
Diagrama do carrinho sobre trilho.
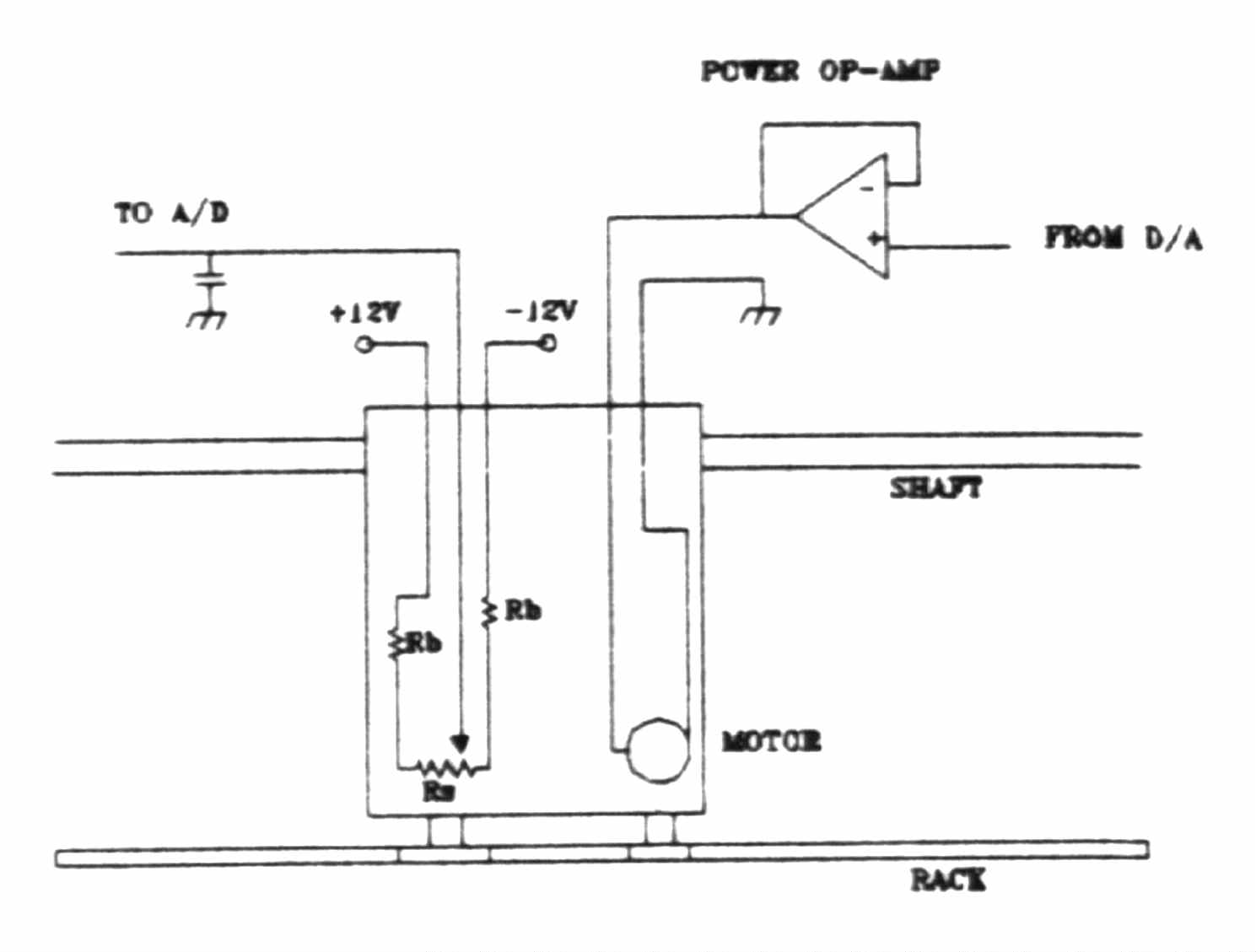
Tabela 1: Parâmetros do carrinho sobre trilho.