![]()
Experimento de modelagem, identificação e controle de um servomecanismo de posicionamento angular com haste flexível
Professor: José Paulo V. S. da Cunha
Turmas: 01 e 02
Segundo semestre de 2014
Sumário
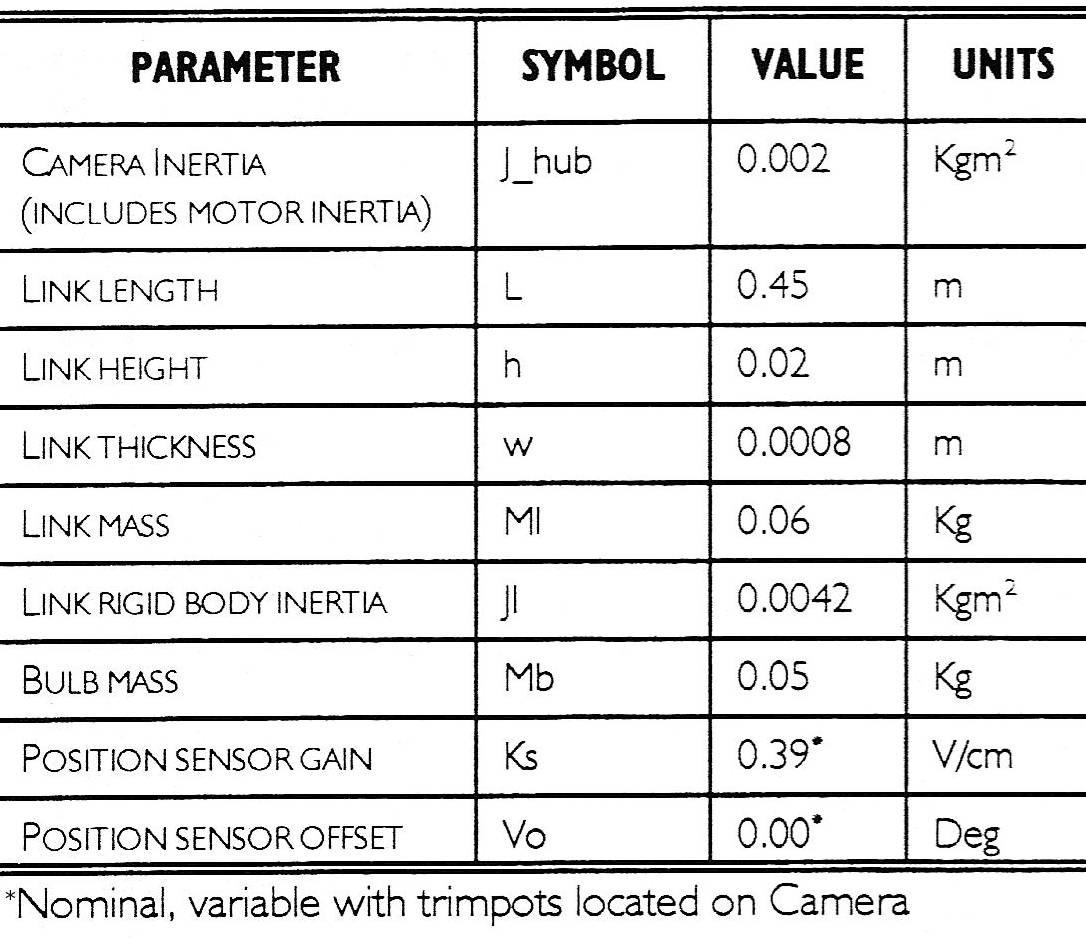
Nesta página encontram-se informações sobre os experimentos que os alunos deverão realizar e sobre os quais elaborarão relatórios. O sistema Rotary Motion Position Servo é descrito nas Seções 2.1 e 5.1.1 do manual (Apkarian, 1995). A haste flexível que será acoplada a este, Flexible Link/FLEXCAM, é descrita nas Seções 2.5 e 5.1.5 do manual (Apkarian, 1995). A Figura 1 apresenta o diagrama mecânico do servomecanismo rotativo destacando-se as engrenagens do motor e a engrenagem do potenciômetro. A Figura 2 apresenta o diagrama elétrico da conexão do motor com o amplificador operacional de potência e a conexão do potenciômetro de medição de posição com o sistema de aquisição de dados. A Figura 3 apresenta o diagrama de blocos do servomecanismo rotativo, onde são destacados os seus principais parâmetros para auxiliar na modelagem da dinâmica do servomecanismo. A Figura 4 apresenta o diagrama mecânico da haste flexível em que se destacam algumas variáveis para a modelagem da sua dinâmica. A Figura 5 apresenta o diagrama elétrico da conexão da FLEXCAM para a medição da posição da ponta da haste com o sistema de aquisição de dados. As Tabelas 1, 2 e 3 relacionam os valores nominais dos parâmetros a serem usados na modelagem da dinâmica do sistema.
A modelagem deste servomecanismo pode ser auxiliada pelo estudo de um exemplo na Seção 4.3 do livro (Ogata, 1998), Exemplo A.3.23 do livro (Ogata, 2003) ou Exemplo A.3.9 do livro (Ogata, 2010). A haste flexível poderá ser considerada como um sistema massa-mola de segunda ordem pouco amortecido como em (Souza et alli, 2010), embora de fato seja um sistema com parâmetros distribuídos e diversos modos ressonantes como em (Barbosa e Góes, 2008).
Os alunos receberão Informações complementares sobre os experimentos durante as aulas de laboratório.
Os relatórios devem ser elaborados seguindo-se as recomendações de (Cunha, 1997).
Resultados Experimentais
Estarão disponíveis na página da disciplina.
Referências
Apkarian, J. (1995), A Comprehensive and Modular Laboratory for Control Systems Design and Implementation, Quanser Consulting.
Barbosa, E. G. and Góes, L. C. S. (2008), “Modeling and identification of flexible structure using bond graphs applied on FLEXCAM Quanser system”, in: Proc. ABCM Symposium Series in Mechatronics, vol. 3, pp. 129-138, Brasília, DF, November.
Cunha, J. P. V. S. (1997), “Orientação para melhorar a elaboração de relatórios técnicos no ensino de engenharia,” in Anais do III Encontro de Professores de Engenharia da UERJ, (Rio de Janeiro), pp. 110-114, Novembro.
Ogata, K. (1998), Engenharia de Controle Moderno, 3ª Edição, Livros Técnicos e Científicos S.A..
Ogata, K. (2003), Engenharia de Controle Moderno, 4ª Edição, Pearson Education do Brasil.
Ogata, K. (2010), Engenharia de Controle Moderno, 5ª Edição, Pearson Education do Brasil.
Souza, L. C. G., Guerman, A. and Smirnov, G. (2010), “Experimental optimization of control techniques to design a flexible satellite attitude Controller”, in: Proc. 2nd International Conference on Engineering Optimization, Lisbon, Portugal, September.
Figura 1:
Diagrama mecânico do servomecanismo rotativo.
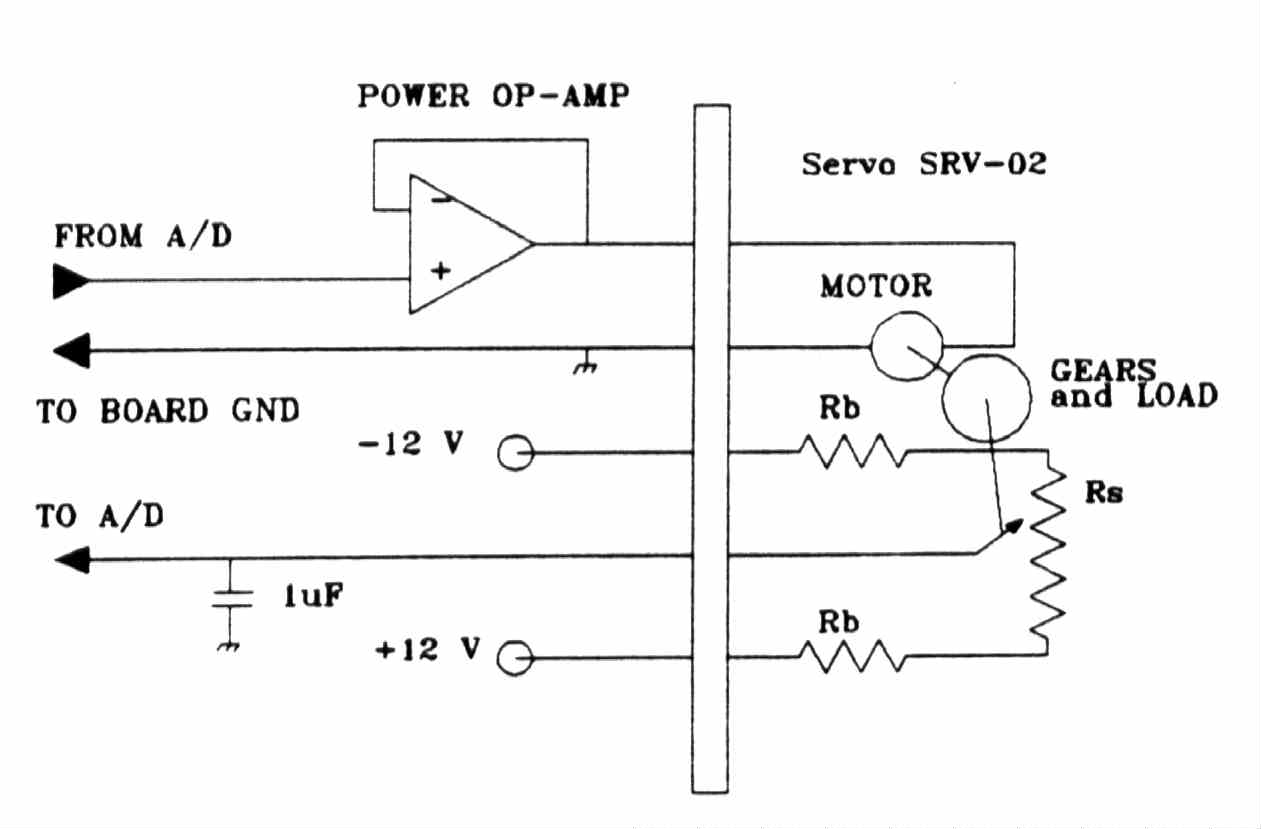
Figura 2:
Diagrama elétrico do servomecanismo rotativo.

Figura 3:
Diagrama de blocos do servomecanismo rotativo.
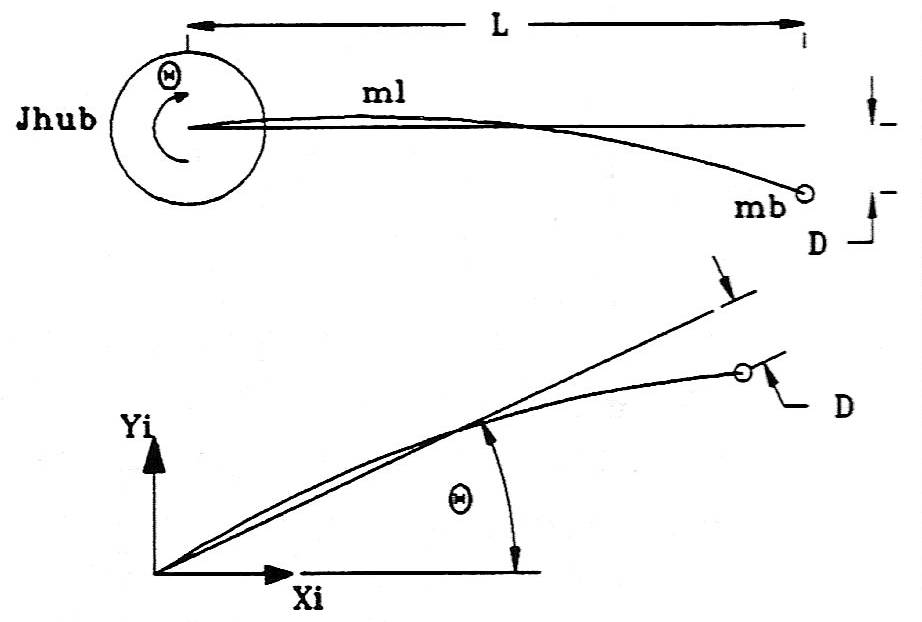
Figura 4: Diagrama mecânico da haste flexível.
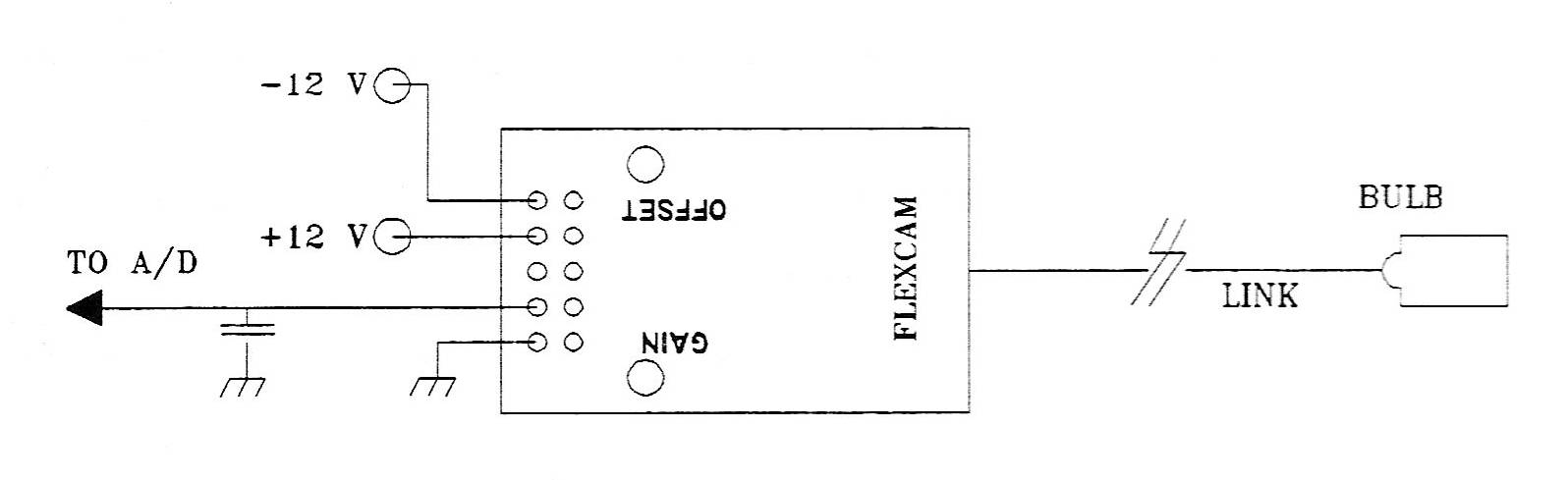
Figura 5: Diagrama elétrico da FLEXCAM (haste flexível).
Tabela 1: Parâmetros do servomecanismo rotativo (parte 1).
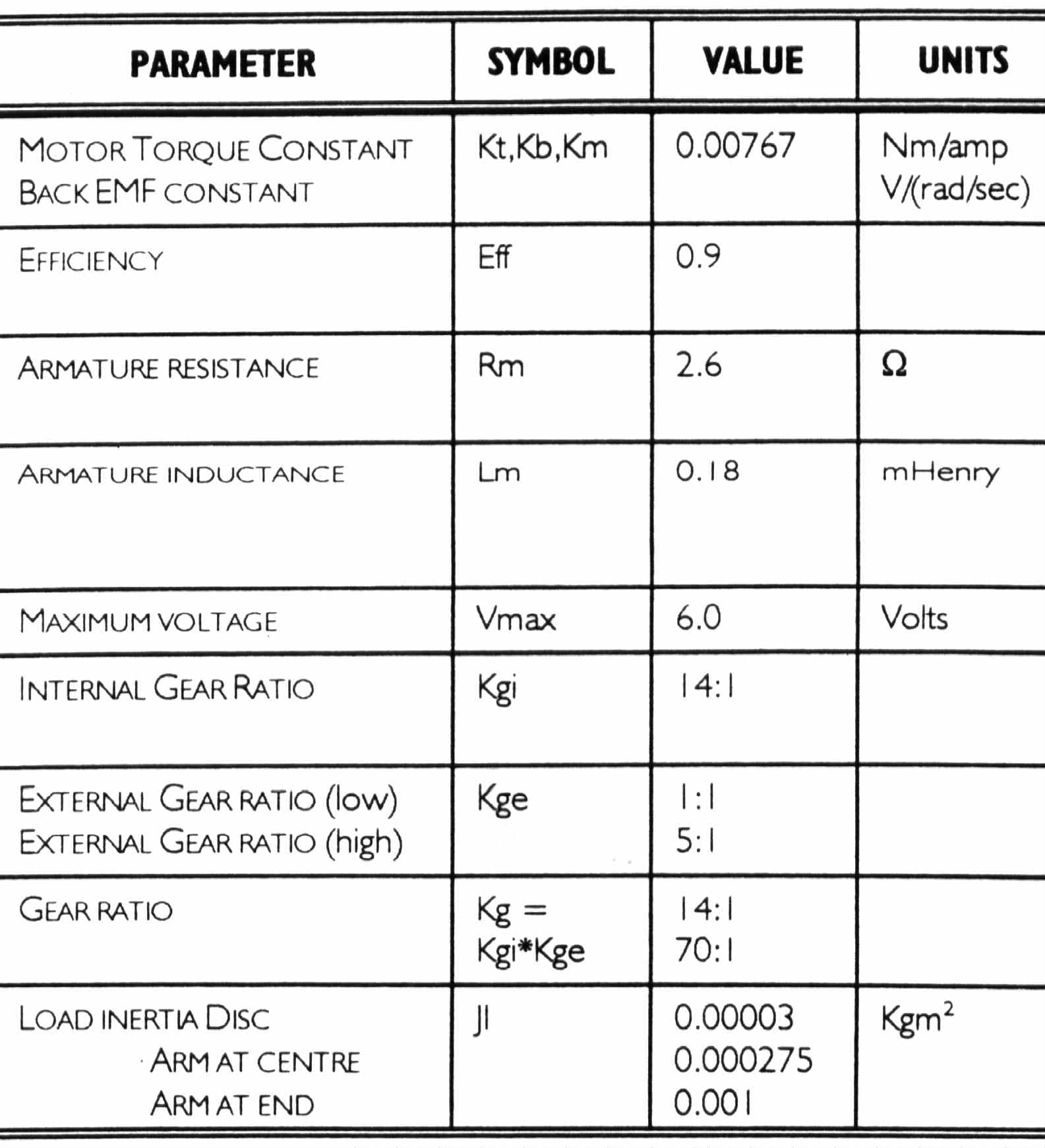
Tabela 2: Parâmetros do servomecanismo rotativo (parte 2).
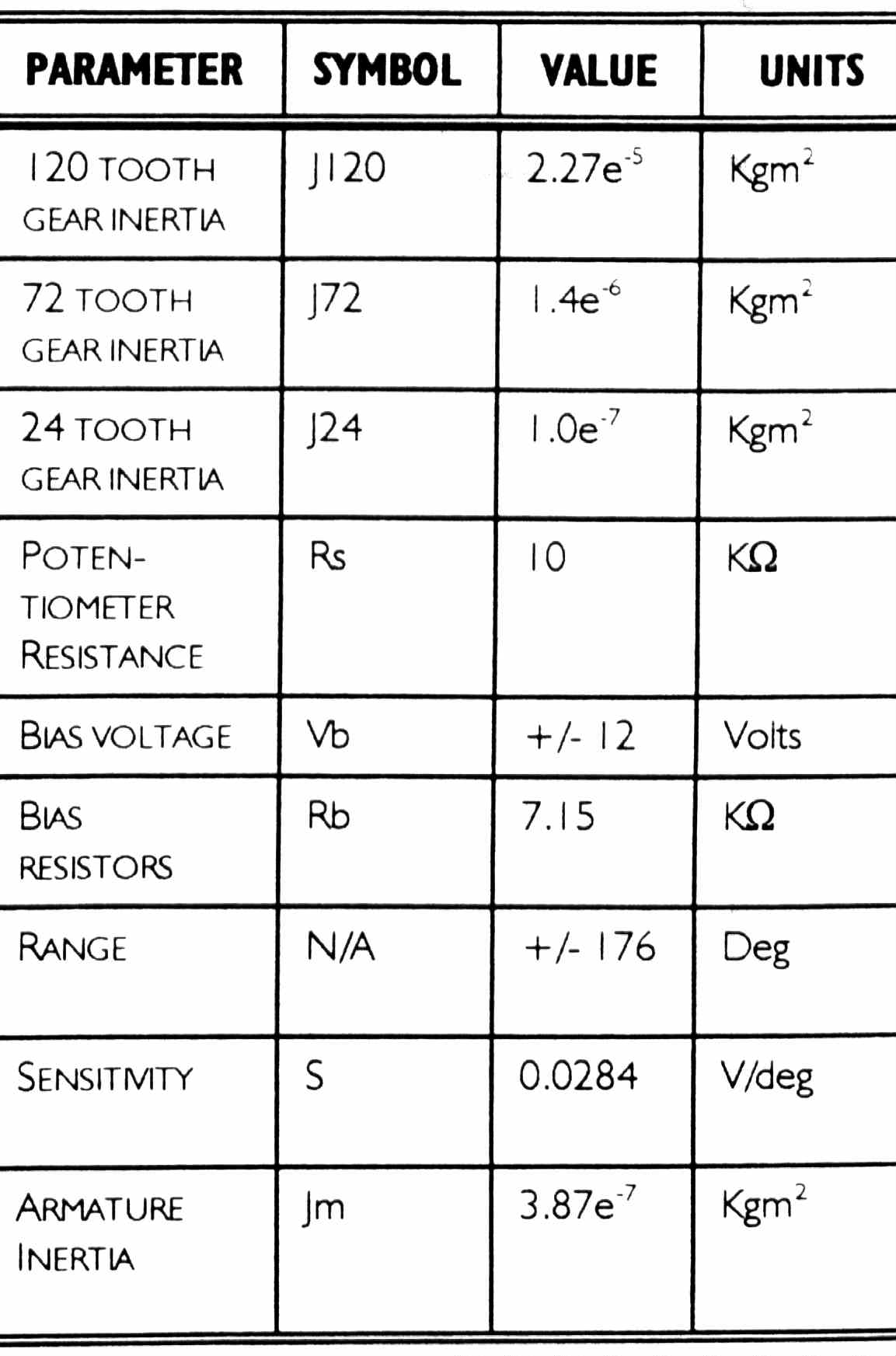
Tabela 3: Parâmetros da haste flexível.