Sistemas de Segunda Ordem
Para auxiliar os alunos nas aulas de laboratório da disciplina Controle e Servomecanismos I, abaixo são apresentados alguns gráficos sobre a resposta de sistemas lineares de segunda ordem no domínio do tempo (Figuras 1 a 4) e no domínio da freqüência (Figura 5). É importante lembrar que o sistema aqui considerado possui ganho DC unitário, o que se reflete no valor de regime da sua resposta ao degrau e no ganho para baixas freqüências. A função de transferência do sistema aqui considerado é apresentada na Figura 3.
Essas figuras foram extraídas do livro Ogata (1997), onde são abordados diversos aspectos sobre os sistemas de segunda ordem.
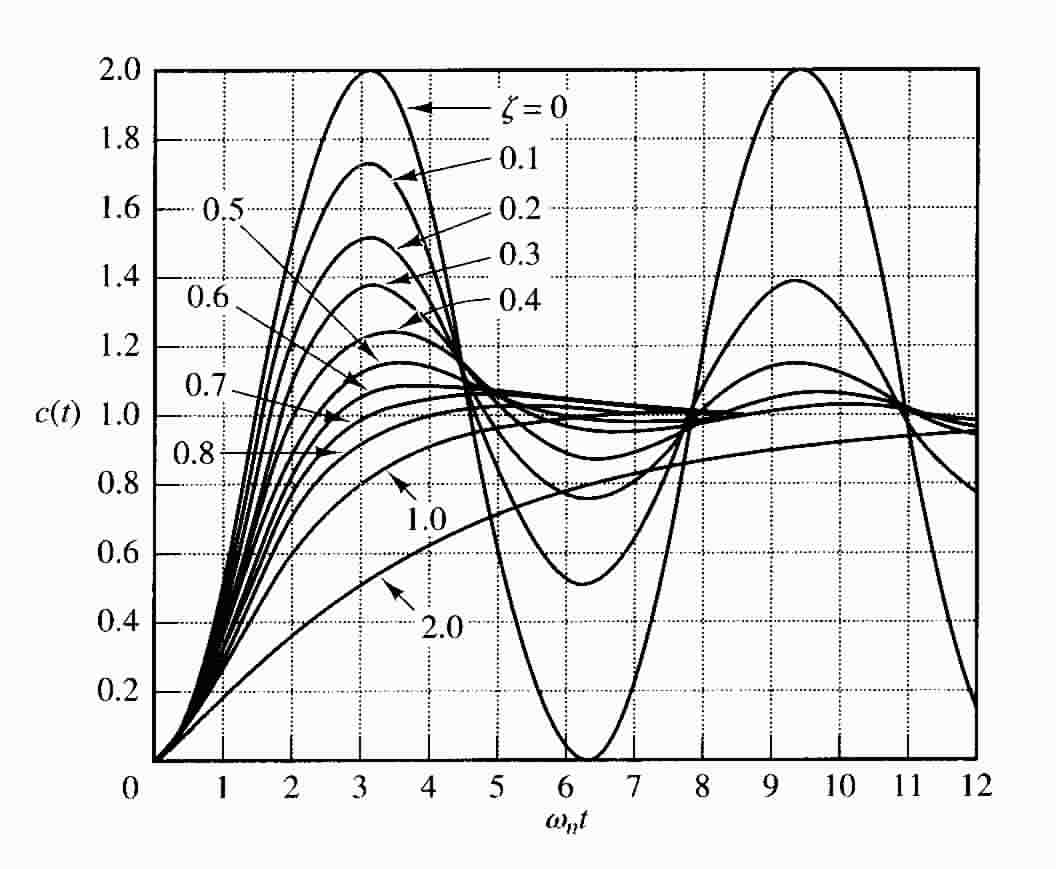
Figura 1: Resposta de um sistema de segunda ordem a um degrau unitário. Note que o tempo está normalizado (omegant) tornando-se adimensional.
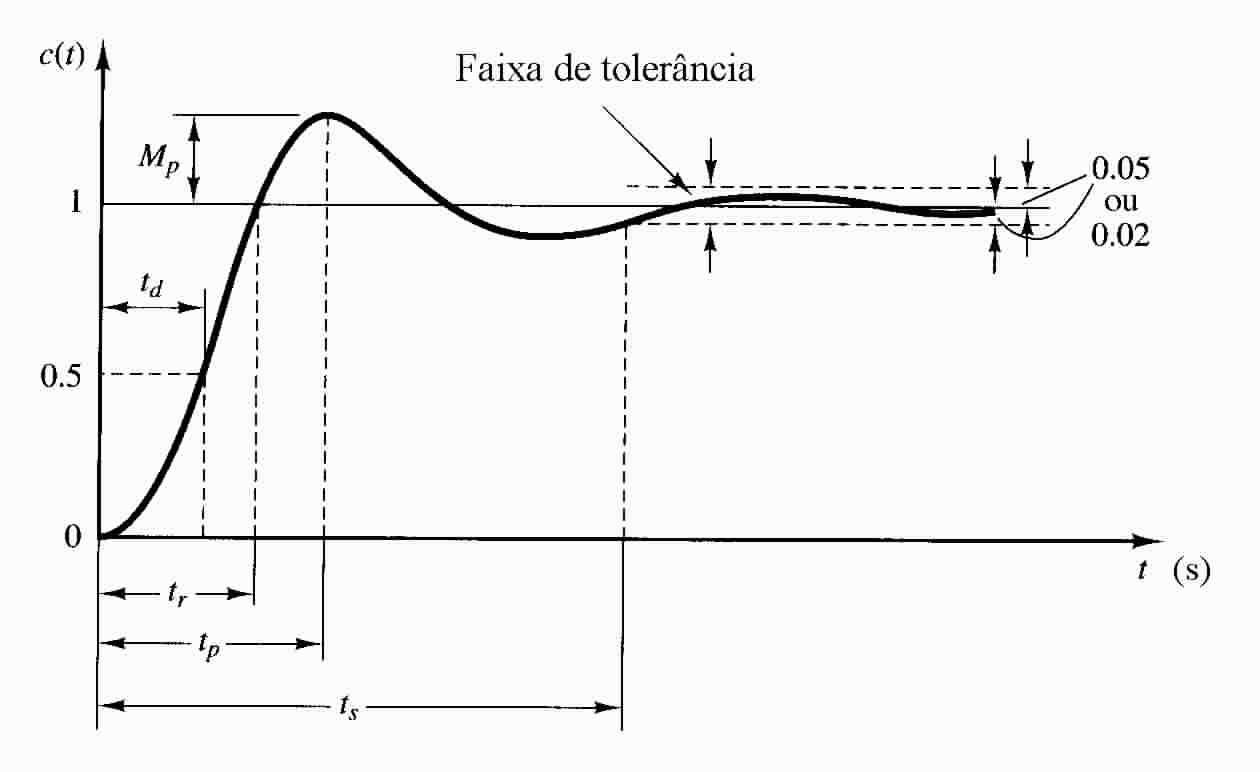
Figura 2: Definições de algumas características da resposta ao degrau:
Mp - máximo overshoot percentual: Mp:={[c(tp)-c(tinfinito)]/c(tinfinito)}.100% ;
tr - tempo de subida (rise time);
ts - tempo de assentamento (settling time);
td - tempo de atraso (delay time);
tp - tempo do pico (peak time).
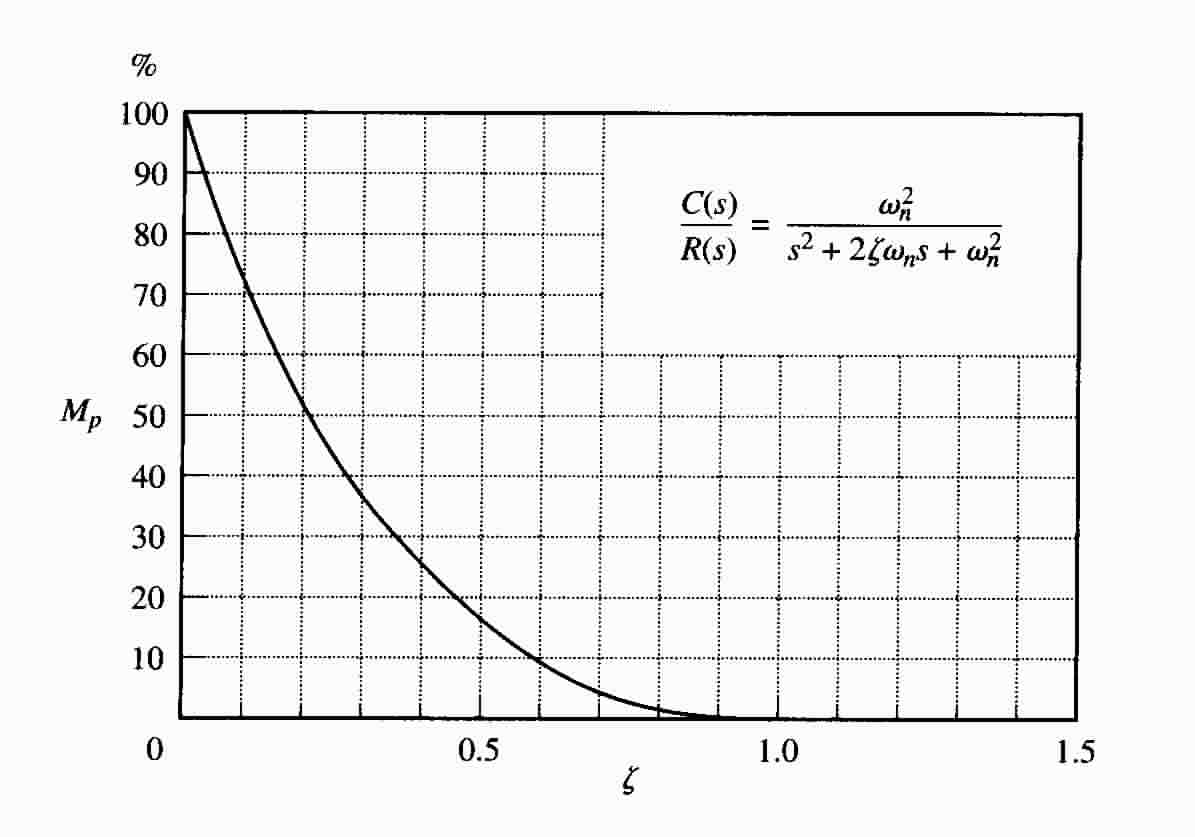
Figura 3: Máximo overshoot percentual (Mp) em função do fator de amortecimento (zeta) para o sistema de segunda ordem. A função de transferência do sistema está destacada no canto superior direito.
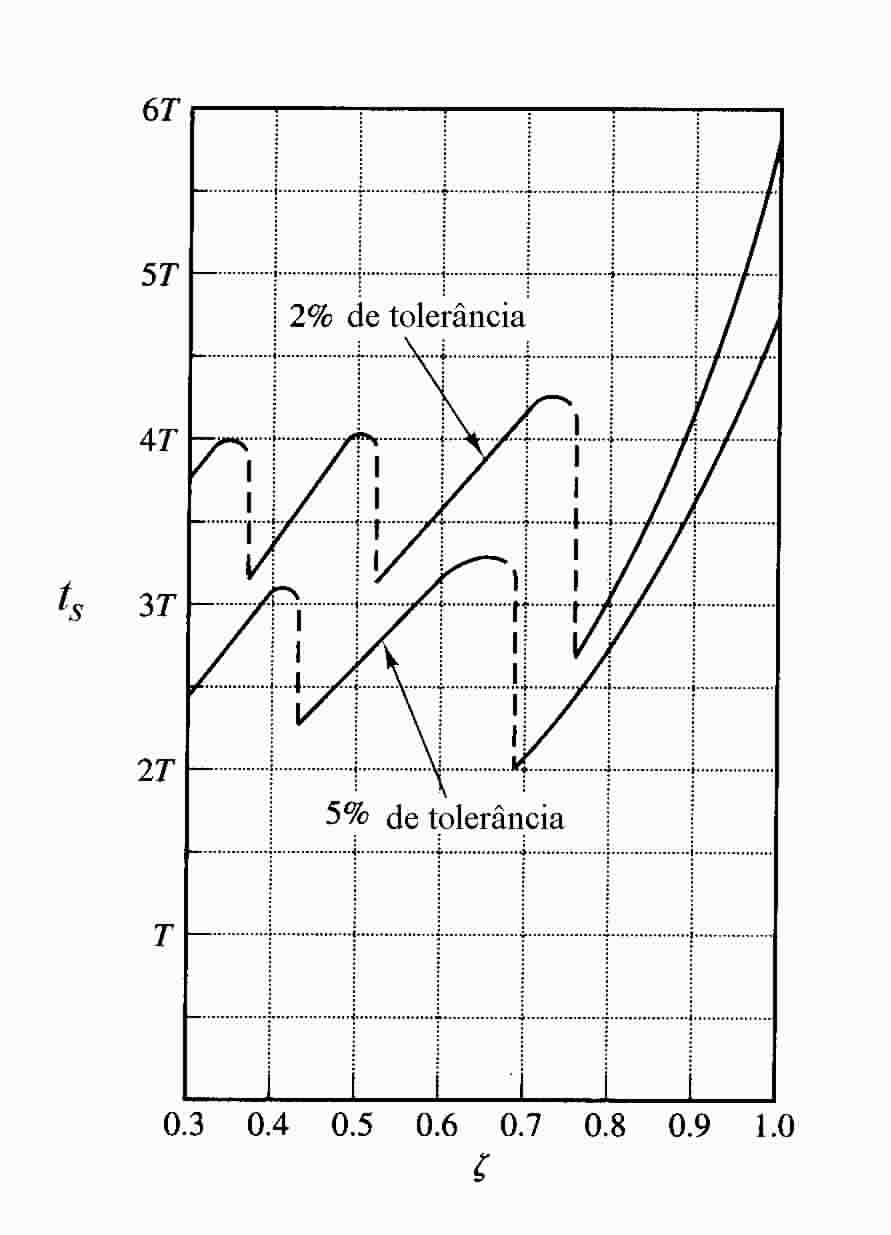
Figura 4: Tempo de assentamento (ts) em função do fator de amortecimento (zeta) para o sistema de segunda ordem. Note que o tempo de assentamento depende de T:=1/(zeta.omegan).
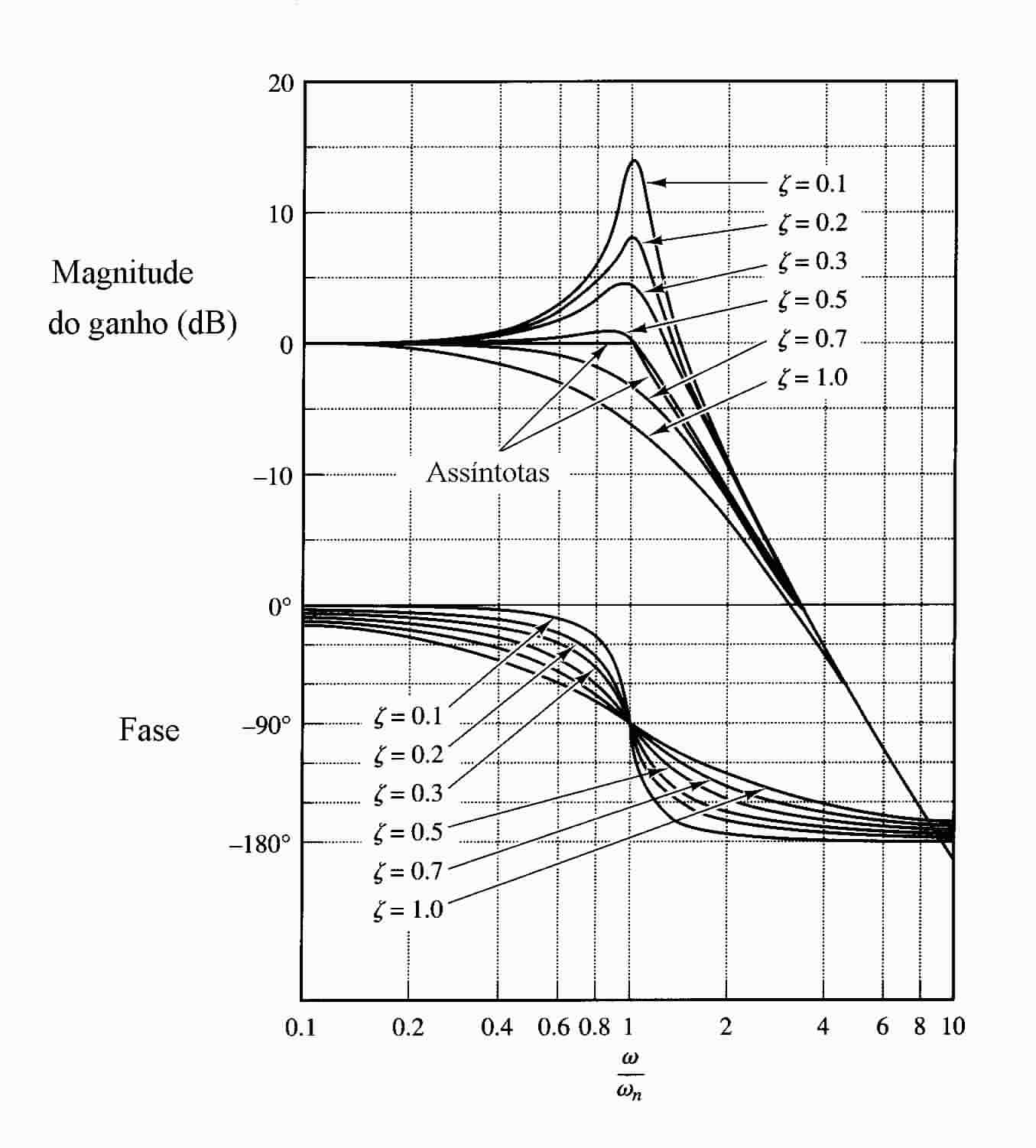
Figura 5: Curvas de resposta em freqüência do sistema de segunda ordem. Note que a freqüência está normalizada (omega/omegan) tornando-se adimensional.
Referência
Ogata, K. (1997), Modern Control Engineering, Prentice-Hall, third edition.
Revisado em 02 de setembro de 2004.